Εισάγετε μια λέξη ή φράση σε οποιαδήποτε γλώσσα 👆
Γλώσσα:
Μετάφραση και ανάλυση λέξεων από την τεχνητή νοημοσύνη ChatGPT
Σε αυτήν τη σελίδα μπορείτε να λάβετε μια λεπτομερή ανάλυση μιας λέξης ή μιας φράσης, η οποία δημιουργήθηκε χρησιμοποιώντας το ChatGPT, την καλύτερη τεχνολογία τεχνητής νοημοσύνης μέχρι σήμερα:
- πώς χρησιμοποιείται η λέξη
- συχνότητα χρήσης
- χρησιμοποιείται πιο συχνά στον προφορικό ή γραπτό λόγο
- επιλογές μετάφρασης λέξεων
- παραδείγματα χρήσης (πολλές φράσεις με μετάφραση)
- ετυμολογία
Τι (ποιος) είναι Фотограмметрия - ορισμός

Фотограмметрия
(от Фото..., греч. grámma - çàïèñü, èçîáðàæåíèå è ...ìåòðèÿ (Ñì. ...метрия)
 , (1)
, (1)
 . (2)
. (2)
 , (4)
, (4)
 , (5)
, (5)
 (6)
(6)
 , (8)
, (8)

научно-техническая дисциплина, занимающаяся определением размеров, формы и положения объектов по их изображениям на фотоснимках. Последние получают как непосредственно кадровыми, щелевыми и панорамными фотоаппаратами, так и при помощи радиолокационных, телевизионных, инфракрасных-тепловых и лазерных систем (см. Аэрометоды). Наибольшее применение, особенно в аэрофотосъёмке (См. Аэрофотосъёмка), имеют снимки, получаемые кадровыми фотоаппаратами. В теории Ф. такие снимки считаются центральной проекцией объекта. Уклонения от центральной проекции, вызванные дисторсией (См. Дисторсия) объектива, деформацией фотоматериала и др. источниками ошибок, учитываются по данным калибровки аэрофотоаппарата и снимков. В Ф. используются одиночные снимки и стереоскопические их пары. Эти стереопары позволяют получить стереомодель объекта. Раздел Ф., изучающий объекты по стереопарам, называется стереофотограмметрией.
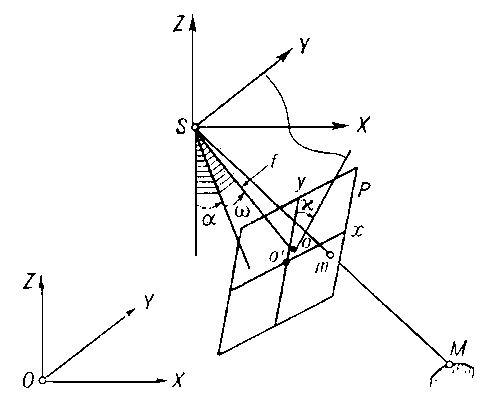
Положение снимка в момент фотографирования определяют три элемента внутреннего ориентирования - фокусное расстояние фотокамеры f, координаты x0, y0 главной точки о (рис. 1) и шесть элементов внешнего ориентирования - координаты центра проекции S - XS, YS, ZS, продольный и поперечный углы наклона снимка α и ω и угол поворота χ.
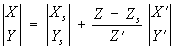
Между координатами точки объекта и её изображения на снимке существует связь:
где X, Y, Z и XS, YS, ZS - координаты точек М и S в системе OXYZ; X', Y', Z' - координаты точки m в системе SXYZ, параллельной OXYZ, вычисляемые по плоским координатам х и у:
Здесь
a1 = cos αcosχ - sinαsinωsinχ
a2 = - cosαsinχ - sinαsin ωcosχ
a3 = - sinαcos ω
b1 = cosωsinχ
b2 = cosωcosχ (3)
b3 = -sinω
c1 = sinαcosχ + cosαsinωsinχ,
c2 = - sinαcosχ + cosαsinωcosχ,
c3 = cosαcosω
- направляющие косинусы.
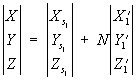
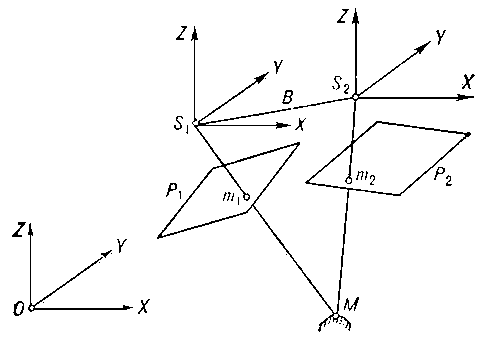
Формулы связи между координатами точки М объекта (рис. 2) и координатами её изображений m1 и m2 на стереопаре P1 - P2 имеют вид:
где
BX, BY и BZ - проекции базиса В на оси координат. Если элементы внешнего ориентирования стереопары известны, то координаты точки объекта можно определить по формуле (4) (метод прямой засечки). По одиночному снимку положение точки объекта можно найти в частном случае, когда объект плоский, например равнинная местность (Z = const). Координаты х и у точек снимков измеряются на монокомпараторе или Стереокомпараторе. Элементы внутреннего ориентирования известны из результатов калибровки фотоаппарата, а элементы внешнего ориентирования можно определить при фотографировании объекта или в процессе фототриангуляции (См. Фототриангуляция). Если элементы внешнего ориентирования снимков неизвестны, то координаты точки объекта находят с использованием опорных точек (метод обратной засечки). Опорная точка - опознанная на снимке контурная точка объекта, координаты которой получены в результате геодезических измерений или из фототриангуляции. Применяя обратную засечку, сначала определяют элементы взаимного ориентирования снимков P1 - P2 (рис. 3) - α'1, χ'1, a'2, ω'2, χ'2 в системе S1X'Y'Z'; ось Х которой совпадает с базисом, а ось Z лежит в главной базисной плоскости S1O1S2 снимка P1. Затем вычисляют координаты точек модели в той же системе. Наконец, используя опорные точки, переходят. от координат точек модели к координатам точек объекта.
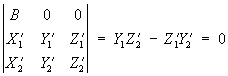
Элементы взаимного ориентирования позволяют установить снимки в то положение относительно друг друга, которое они занимали при фотографировании объекта. В этом случае каждая пара соответственных лучей, например S1m1 и S2m2, пересекается и образует точку (m) модели. Совокупность лучей, принадлежащих снимку, называется связкой, а центр проекции - S1 или S2 - вершиной связки. Масштаб модели остаётся неизвестным, т.к. расстояние S1S2 между вершинами связок выбирается произвольно. Соответственные точки стереопары m1 и m2 находятся в одной плоскости, проходящей через базис S1S2. Поэтому
Полагая, что приближённые значения элементов взаимного ориентирования известны, можно представить уравнение (6) в линейном виде:
a δα1' + b δα2' + с δω2' + d δχ1' + e δχ2' + l = V, (7)
где δα1',... e δμ2' - поправки к приближённым значениям неизвестных, а,..., е - частные производные от функции (6) по переменным α1',... χ2', l - значение функции (6), вычисленное по приближённым значениям неизвестных. Для определения элементов взаимного ориентирования измеряют координаты не менее пяти точек стереопары, а затем составляют уравнения (7) и решают их способом последовательных приближений. Координаты точек модели вычисляют по формулам (4), выбрав произвольно длину базиса В и полагая Xs1 = Ys1 = Zs1 = 0, BX = В, BY = BZ = 0. При этом пространственные координаты точек m1 и m2 находят по формулам (2), а направляющие косинусы - по формулам (3): для снимка P1 по элементам α1', ω1' = 0, χ1', а для снимка P2 по элементам α2', ω2', χ2'.
По координатам X' Y' Z' точки модели определяют координаты точки объекта:
где t - знаменатель масштаба модели. Направляющие косинусы получают по формулам (3), подставляя вместо углов α, ω и χ продольный угол наклона модели ξ, поперечный угол наклона модели η и угол поворота модели θ.
Для определения семи элементов внешнего ориентирования модели -  ,
,  ,
,  , ξ, η, θ, t - составляют уравнения (8) для трёх или более опорных точек и решают их. Координаты опорных точек находят геодезическими способами или методом фототриангуляции. Совокупность точек объекта, координаты которых известны, образует цифровую модель объекта, служащую для составления карты и решения различных инженерных задач, например для изыскания оптимальной трассы дороги. Кроме аналитических методов обработки снимков, применяются аналоговые, основанные на использовании фотограмметрических приборов - Фототрансформатора, Стереографа, Стереопроектора и др.
, ξ, η, θ, t - составляют уравнения (8) для трёх или более опорных точек и решают их. Координаты опорных точек находят геодезическими способами или методом фототриангуляции. Совокупность точек объекта, координаты которых известны, образует цифровую модель объекта, служащую для составления карты и решения различных инженерных задач, например для изыскания оптимальной трассы дороги. Кроме аналитических методов обработки снимков, применяются аналоговые, основанные на использовании фотограмметрических приборов - Фототрансформатора, Стереографа, Стереопроектора и др.
Щелевые и панорамные фотоснимки, а также снимки, полученные с применением радиолокационных, телевизионных, инфракрасных-тепловых и других съёмочных систем, существенно расширяют возможности Ф., особенно при космических исследованиях. Но они не имеют единого центра проекции, и элементы внешнего ориентирования их непрерывно изменяются в процессе построения изображения, что осложняет использование таких снимков для измерительных целей.
Основные достоинства фотограмметрических методов работ: большая производительность, т.к. измеряются не объекты, а их изображения; высокая точность благодаря применению точных аппаратов и инструментов для получения и измерения снимков, а также строгих способов обработки результатов измерений; возможность изучения как неподвижных, так и движущихся объектов; полная объективность результатов измерений; измерения выполняются дистанционным методом, что имеет особое значение в условиях, когда объекты недоступны (летящий самолёт или снаряд) или когда пребывание в зоне объекта небезопасно для человека (действующий вулкан, ядерный взрыв). Ф. широко применяется для создания карт Земли, других планет и Луны, измерения геологических элементов залегания пород и документации горных выработок, изучения движения ледников и динамики таяния снежного покрова, определения лесотаксационных характеристик, исследования эрозии почв и наблюдения за изменениями растительного покрова, изучения морских волнений и течений и выполнения подводных съёмок, изысканий, проектирования, возведения и эксплуатации инженерных сооружений, наблюдения за состоянием архитектурных ансамблей, зданий и памятников, определения в военном деле координат огневых позиций и целей и др.
Лит.: Бобир Н. Я., Лобанов А. Н., Федорук Г. Д., Фотограмметрия, М., 1974; Дробышев Ф. В., Основы аэрофотосъемки и фотограмметрии, 3 изд., М., 1973; Коншин М. Д., Аэрофотограмметрия, М., 1967; Лобанов А. Н., Аэрофототопография, М., 1971; его же, Фототопография, 3 изд., М., 1968; Дейнеко В. Ф., Аэрофотогеодезия, М., 1968; Соколова Н. А., Технология крупномасштабных аэротопографических съемок, М., 1973; Русинов М. М., Инженерная фотограмметрия, М., 1966; Rüger W., Buchholtz A., Photogrammetrie, 3 Aufl, B., 1973; Manual of photogrammetry, v. 1-2, Menasha, 1966; Bonneval Н., Photogrammétrie générate, t. 1-4, P., 1972; Piasecki М. B., Fotogrametria, 3 wyd., Warsz., 1973.
А. Н. Лобанов.
Рис. 1. к ст. Фотограмметрия.
Рис. 2. к ст. Фотограмметрия.
Рис. 3. к ст. Фотограмметрия.
фотограмметрия
ж.
1) Определение истинной величины предмета путем измерения его фотографического изображения.
2) Составление планов местности по фотографическим снимкам.
1) Определение истинной величины предмета путем измерения его фотографического изображения.
2) Составление планов местности по фотографическим снимкам.
ФОТОГРАММЕТРИЯ
(от фото ..., греч. gramma - запись, изображение и ...метрия), определение форм, размеров и положения объектов по их фотографическим изображениям. Применяется в геодезии, картографии, военном деле, космических исследованиях и др.
Βικιπαίδεια
Фотограмметрия
Фотограмме́трия (от греч. φωτός — свет, γράμμα — запись, изображение и μετρέω — измеряю) — научно-техническая дисциплина, занимающаяся определением формы, размеров, положения и иных характеристик объектов по их фотоизображениям.
Существует два основных направления в фотограмметрии:
- создание карт и планов Земли (и других космических объектов) по снимкам (фототопография),
- решение прикладных задач в архитектуре, строительстве, медицине, криминалистике и т. д. (наземная, прикладная фотограмметрия).
Фотограмметрия появилась в середине XIX века, практически одновременно с появлением самой фотографии. Применять фотографии для создания топографических карт впервые предложил французский геодезист Доминик Ф. Араго примерно в 1840 году.

Παραδείγματα από το σώμα κειμένου για Фотограмметрия
1. Картография, топогеодезия, фотограмметрия и аэрофотослужба.
2. Картография, топогеодезия, фотограмметрия и аэрофотослужба Профессии Гравер оригиналов топографических карт, техник аэрофотографической лаборатории, техник аэрофотосъемного производства, техник-аэрофотограмметрист.